機械手設計過程中有哪些關鍵要素
引言:機械手臂正在各大生產加工企業中發揮越來越大的作用,這些機械手臂能夠連續工作,大大提高了工作效率并節約了企業的人力成本。今天,我們主要為您介紹一下機械手設計過程中有哪些關鍵要素。
機械手按驅動方式可分為液壓式、氣動式、電動式、機械式機械手;按適用范圍可分為專用機械手和通用機械手兩種;按運動軌跡控制方式可分為點位控制和連續軌跡控制機械手等。機械手通常用作機床或其他機器的附加裝置,如在自動機床或自動生產線上裝卸和傳遞工件,在加工中心中更換刀具等,一般沒有獨立的控制裝置。
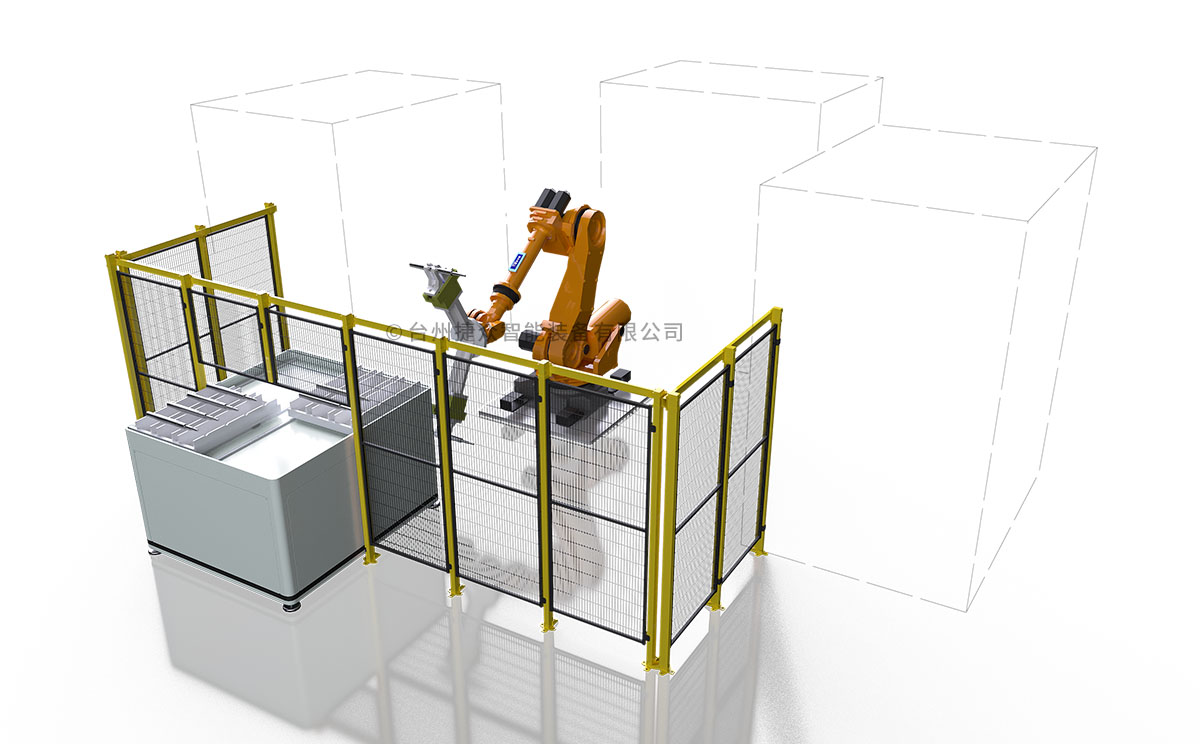
多關節機械手的優點:動作靈活、運動慣性小、通用性強、能抓取靠近機座的工件,并能繞過機體和工作機械之間的障礙物進行工作。隨著生產的需要,對多關節手臂的靈活性,定位精度及作業空間等提出越來越高的要求。
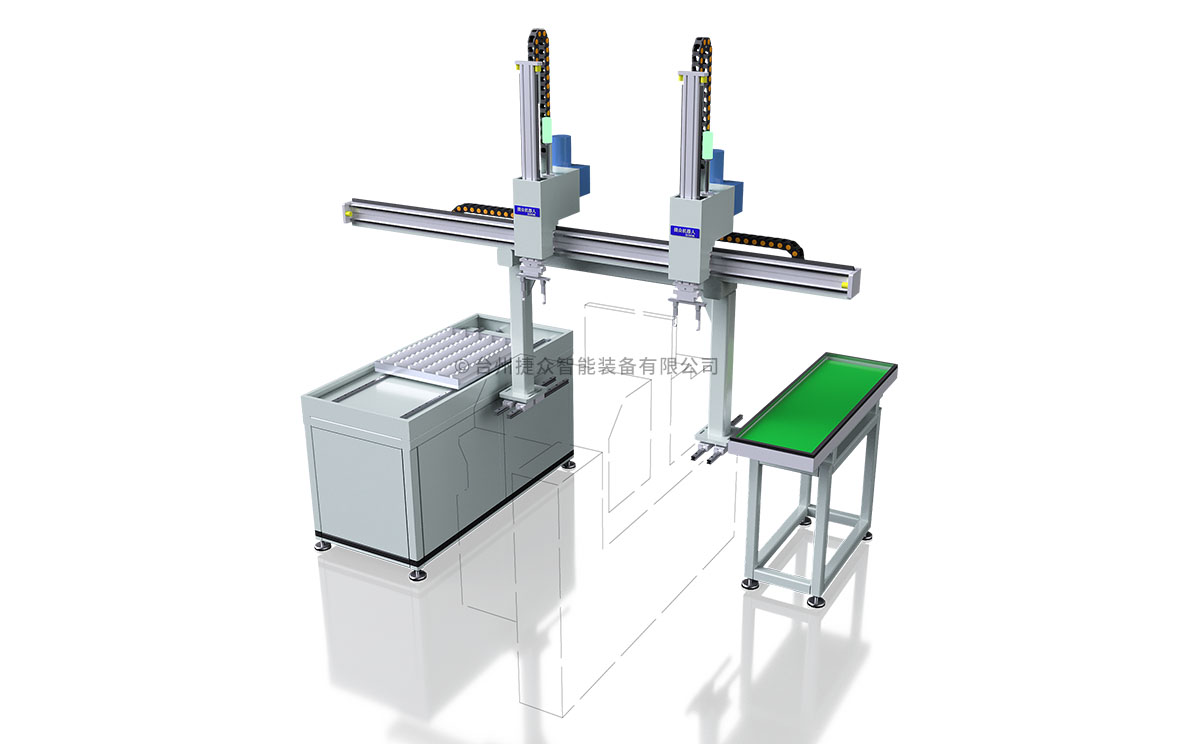
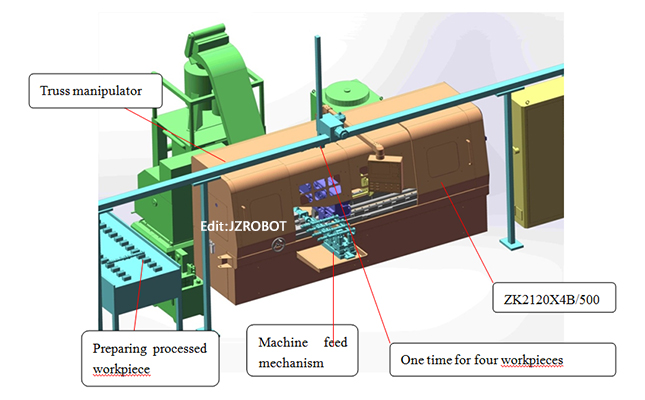
桁架式機械手的優點:動作簡單、運動效率高,對于大批量生產的工件,時效要明顯優于多關節機械手。多關節機械手與桁架式機械手各自有各自的需求市場,同樣在機械手設計方面,也各有不同。

想要設計一個機械手,你需要先了解以下幾點:
第一:確定驅動器數量以及傳動方式
一般機械手都是電機驅動,可以是一個電機也可以是多個,一個電機的機械手只能控制5個手指的張開和閉合,因為是欠驅動的緣故,能夠較好地自適應物體的外形。
傳動方式有很多,現在比較流行的是Tendon驅動,也有不少是連桿,齒輪之類的。
第二:驅動器選型
據我們的工程師介紹,就拿電機驅動為例,機械手有一個很重要的指標就是每個Phalanges的Contact Force,你需要根據你需要的接觸力大小去反推電機的輸出力矩,確定電機型號。在計算接觸力的時候,你根據手指的幾何參數去確定傳遞矩陣和雅克比矩陣,欠驅動這塊計算比較復雜。
第三:傳感器選型
你需要很好地控制這個機械手,你當然要知道手指的反饋信息。我們組里的機械手采用的是2類傳感器,一類是裝在指尖指腹的Touch Senor,一類是裝在電機輸出端的Absolute Angle Sensor 。
第四:柔性關節設計
就像人手一樣,掰一掰手指還是挺有韌性的,設計機械手也一樣,不可能稍微碰撞一下手指就斷掉了。柔性這塊也是需要花心思去設計的。
以上四點就是機械手設計時要注意的要素,機械手臂正逐漸取代人力在生產中的作用,在企業自動化進程中發揮著重要的作用。